VSLAM技术
VSLAM 即Visual Simultaneous Localization and Mapping视觉同步定位和绘图,是一种同时进行地图构建和定位的技术。 也是AR、自动驾驶、智能机器人等领域的 核心技术之一。HMS提供定制化VSLAM技术解决方案,并提供精度性能优异的单/双目摄像头、多目摄像头、深度相机等多种视觉传感器,同时我们对客户硬件平台 进行算法优化。
SiNGARY VSLAM模组优势:
高速高精度,用于边缘计算,
用于快速移动场景,帧频达100fps
深度引擎和VSLAM引擎同时工作, 同时输出两种点云数据
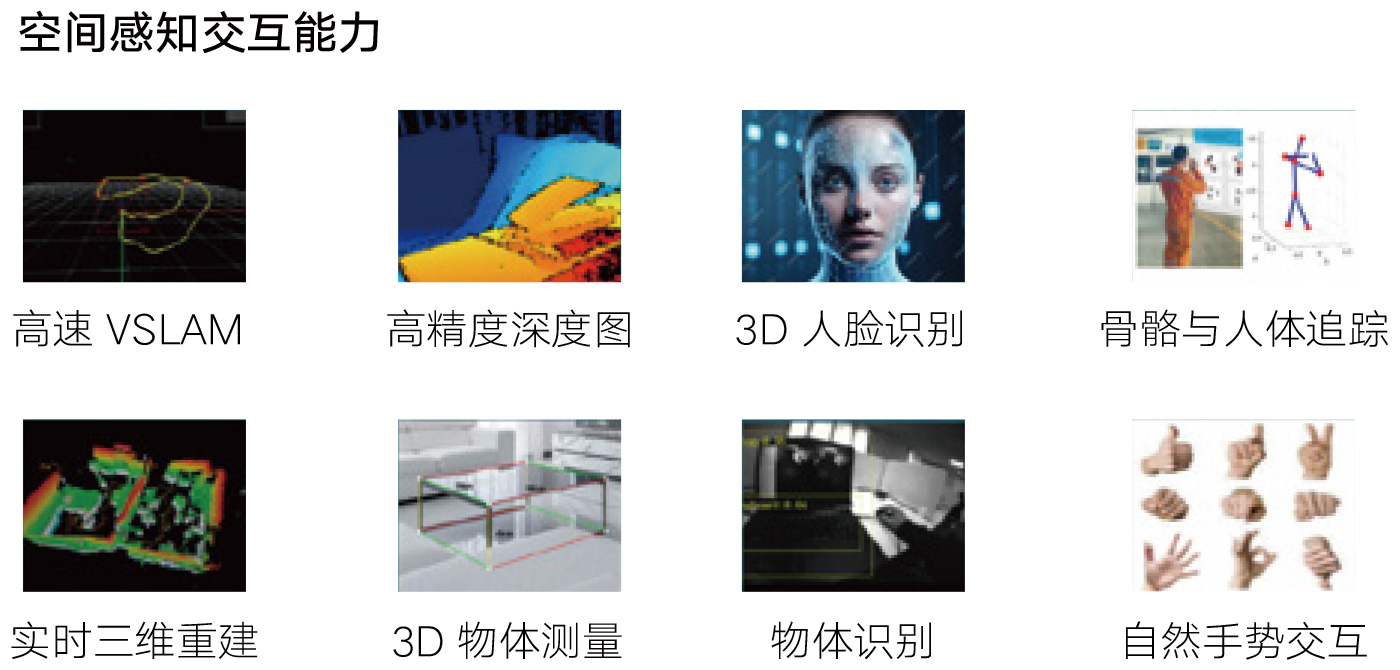
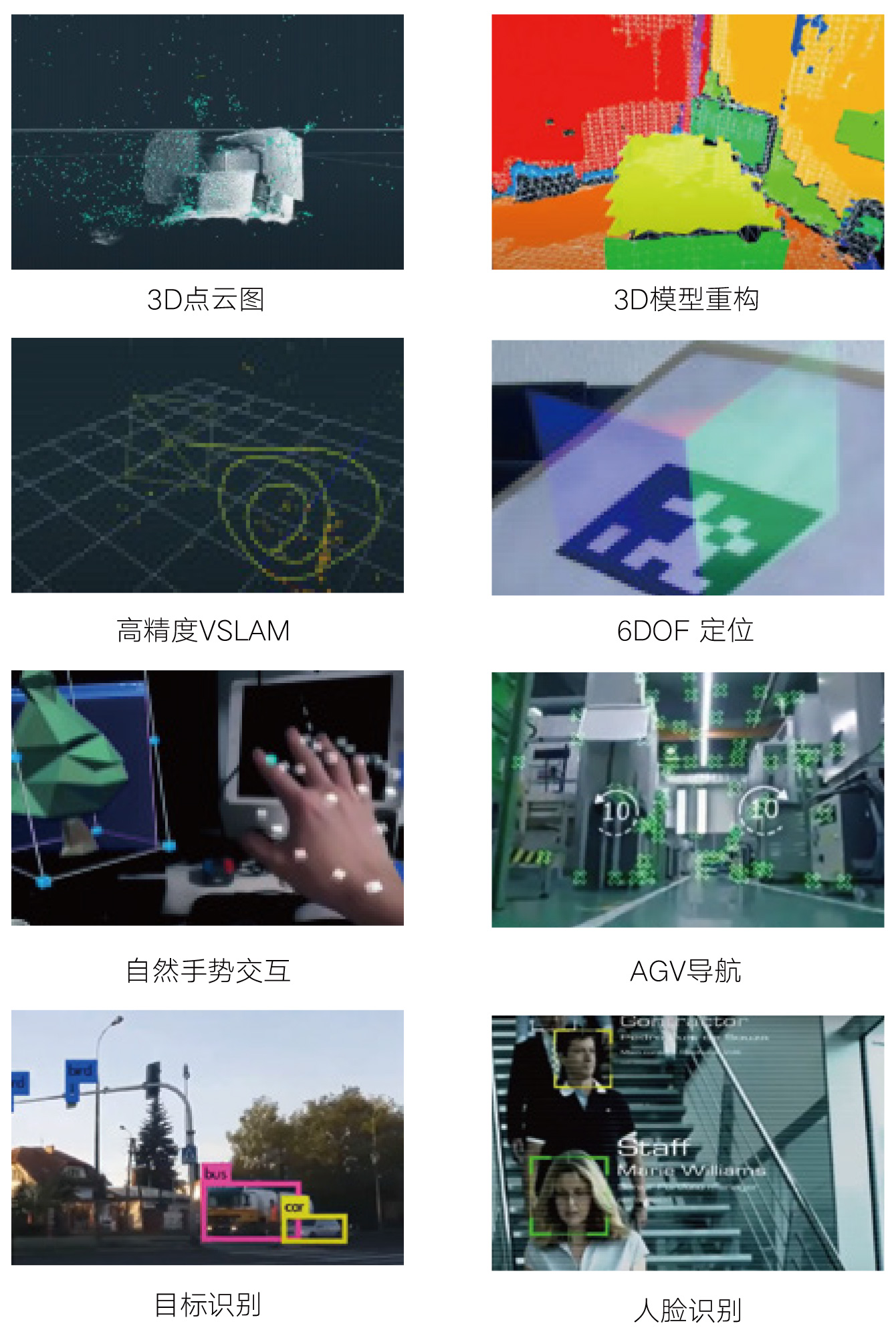
适用场景广泛,拥有自我定位,空间锚定, 特征点提取,实时三维重建等多功能的全能型产品。
HMS支持60多家AGV/AMR或机器人制造商,被多家客户采用进行全球部署。
VSLAM模组和应用
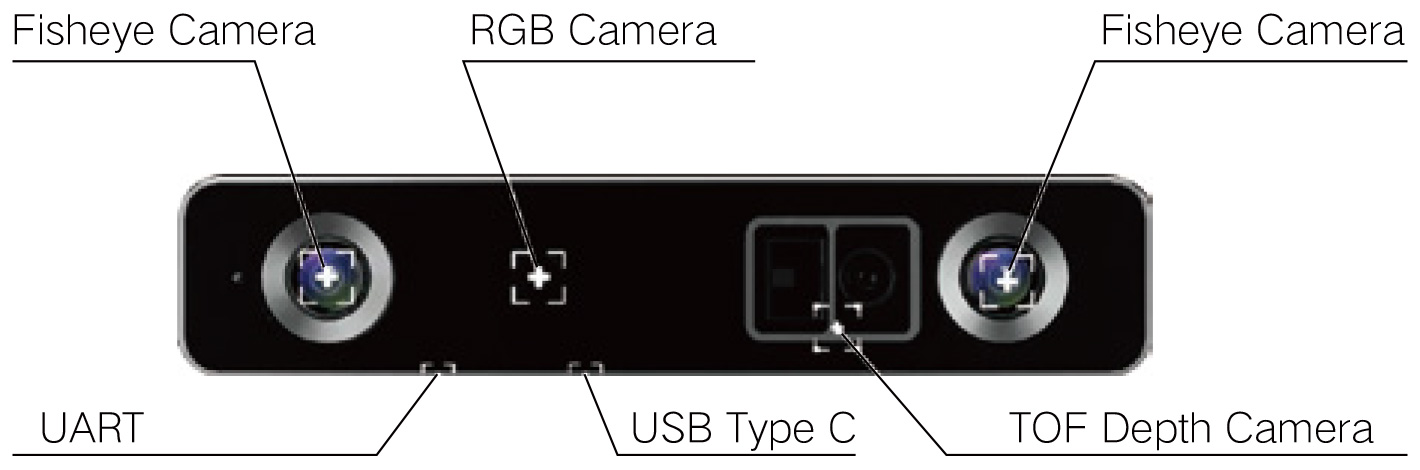
SiNGRAY Stereo PRO 相机配备了
Stereo Pro 具有非常紧凑的一体化配置,配备了自我定位技术和人工智能识别功能。它可以作为“眼睛”可广泛用于AR/VR设备游戏, AI,AGV, 无人机设备,机器人,3D扫描,智能生产,和虚拟场景制作。兼容 Windows 和 Linux 的 SDK。 可轻松构建从图像捕捉控制到识别处理的整个过程,可用于从系统到解决方案的各种场合。
开发方法:
StereoPRO Viewer":Windows 10 及以上版本、Ubuntu 18.04、Andriod 7 及以上版本。开发软件“StereoPRO SDK”:Windows 10 及以上版本、Ubuntu 16.04/18.04/20.04、ROS、Andriod 7 及以上版本。