
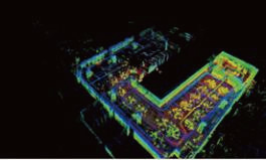
该系统旨在创建高精度的现场3D图,能够自动在建筑工地巡检、记录,和对比工程进度。



该系统旨在创建高精度的现场3D图,能够自动在建筑工地巡检、记录,和对比工程进度
多传感器融合机器人系统,高度智能图像识别技术,
实时估算自身位置并规划路线,可用于建筑工地等瞬息万变的环境。
履带设计, 即使在崎岖不平的道路条件下也能进行高精度三维测绘。
精简的模块化设计,机身紧凑
拥有强劲的爬坡越野能力
可搭载检测设备,支持功能定制
广泛的用于室内外测绘、现场勘探、安防巡检等领域
自动巡检模式以外,还可通过工作人员的手机观测和控制机 器人,以及遥控器操控机器人, 在现场完成人机协同

该系统可用于建筑行业的工地,包括总承包商、分包商和建筑公司、物流设施、制造公司、基础设施相关公司和其他行业。
项 目 | 规 格 | |
机器人本体 | 长×宽×高 | 660mmx570mmx760mm |
整车重量 | 60Kg | |
电池类型 | 三元锂电池 | |
电池 - 容量 | 24V30Ah | |
摩托车 | 2x650W无刷伺服电机 | |
鞋宽 | 100 mm | |
行走性能 | 最大空载运行速度(米/秒) | 1 m/s |
最小转弯半径 | 0 | |
最大净空高度 | 60 | |
连续运转 | 约3小时 | |
充电时间 | 约3小时 | |
充电时间 | 3小时 | |
工作温度范围 | -10℃~ 40℃ | |
最大爬坡角度 | 10°(空载) | |
遥控控制 | 遥控 | 2.4G/最大距离50m |
通讯接口 | CAN | |
自主导航 | 最大遥控速度 | <3.6 公里/小时 |
导航定位 | 自主导航 | |
传感器选择 | VSLAM、激光、云台 | |
机器人管理系统 | CPU | R9-7940HS |
网卡 | 千兆端口、Wi-Fi | |
硬盘 | 1T | |
记忆 | 64G | |
GPU | MD Radeon 780M |
IP65有效防止沙尘和水流侵入
小巧的机身具有出色的爬坡性能,能够穿越复杂地形、颠簸路面和室内外密闭空间
紧凑小巧机身,兼顾复杂地形和室内外狭小空间需求
